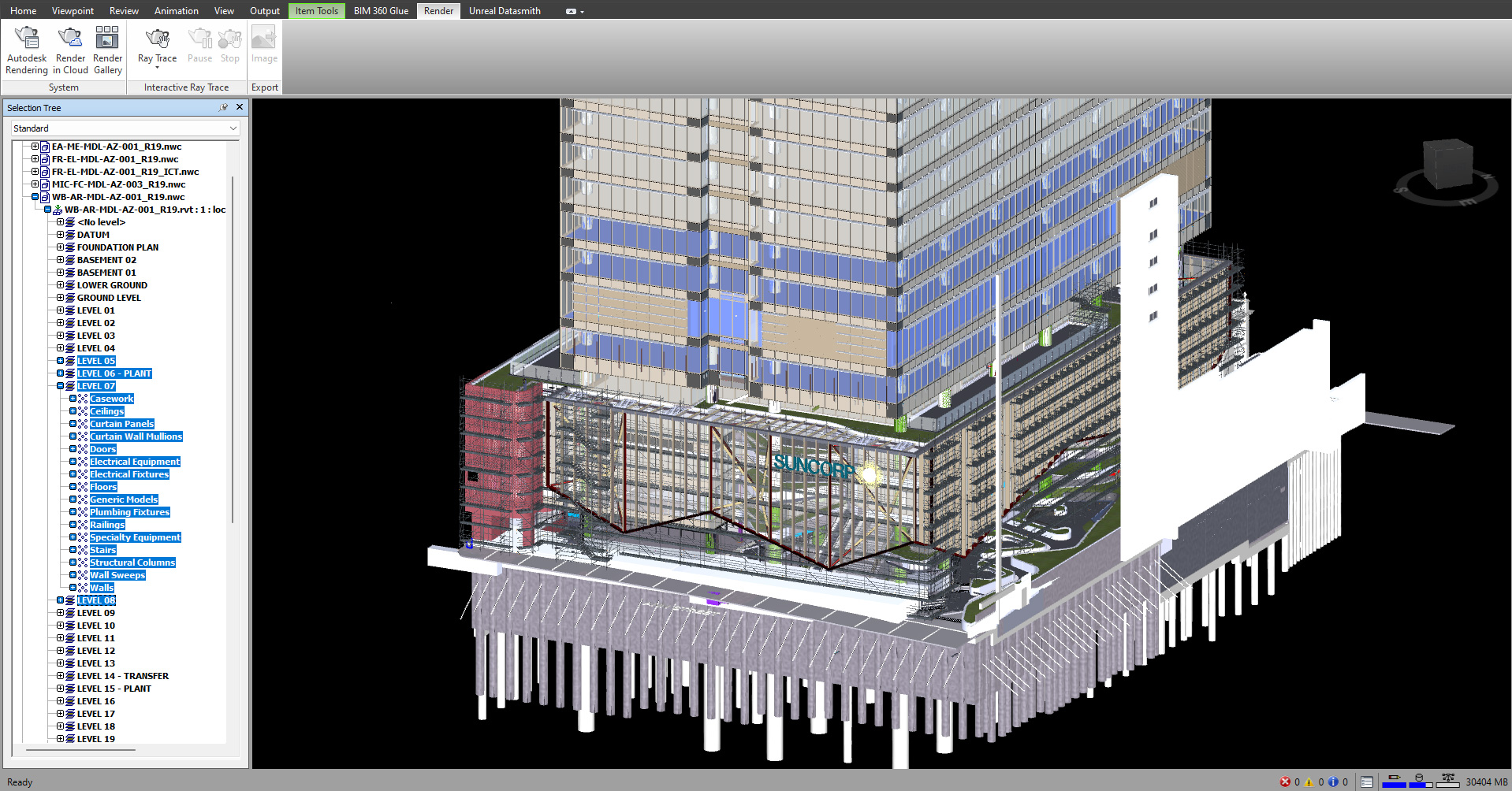
Big BIM data handling
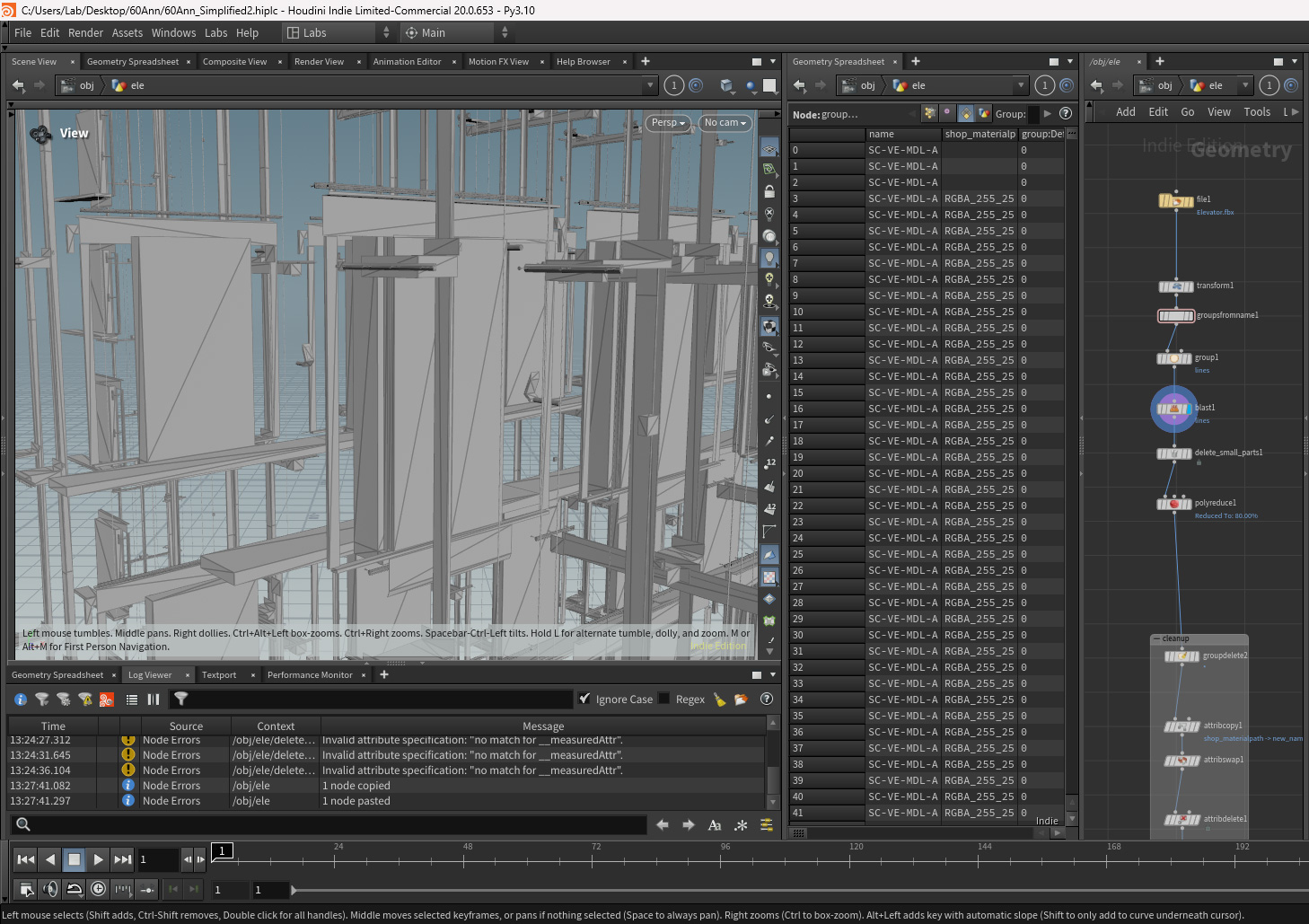
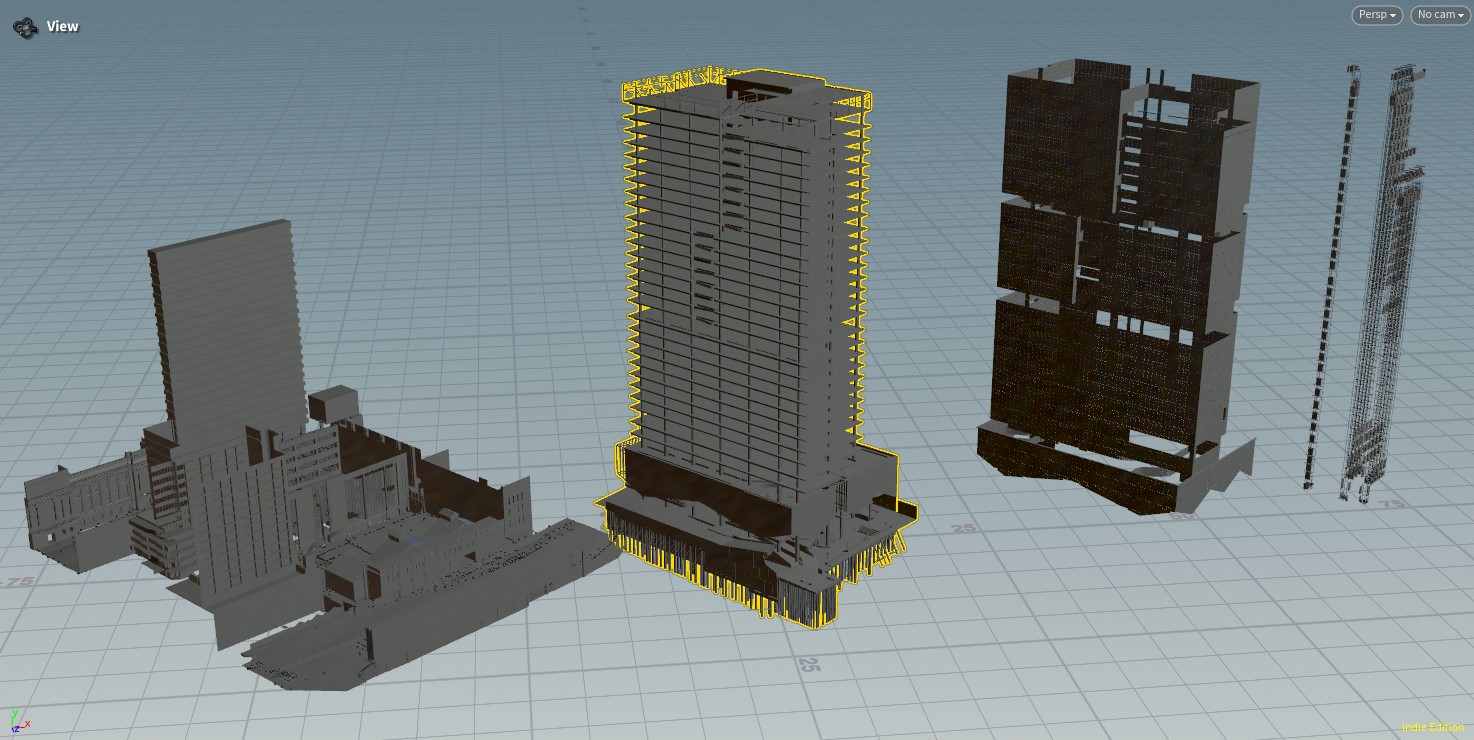
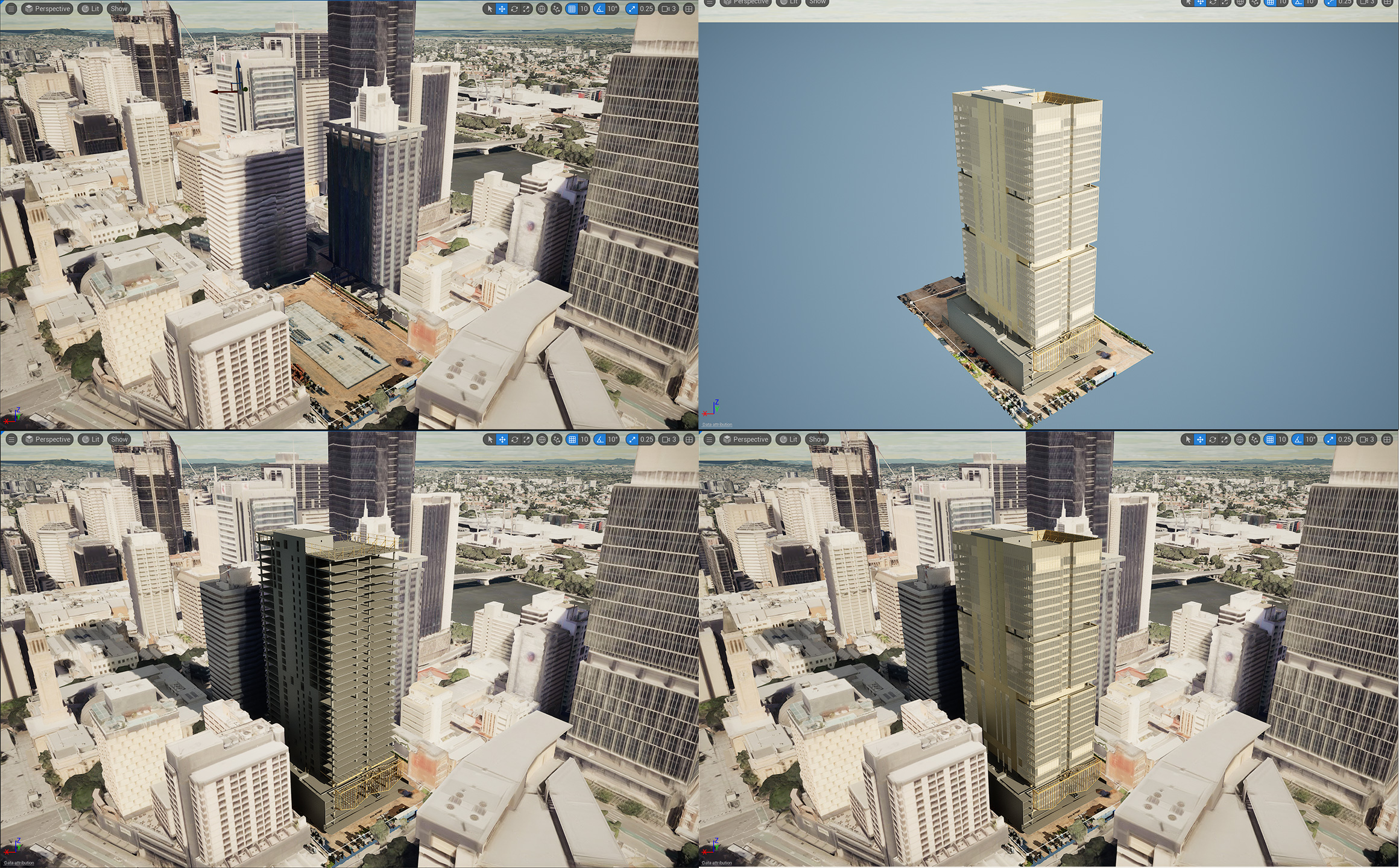
Using a BIM model of 80 Ann street, Brisbane, which contained all electrical, fire services and elevator details, I was able to segment and bring the CAD model into Houdini for poly reduction, UV cleanup and ultimately collapsing parts by material, so that the result could easily be brought into the Unreal engine for visualization (and VR!!!).
In the past, this process would usually take days of processing via multiple software packages, but with Houdini and a few attribute tricks, this only took a few hours. Import was painless!
I also leveraged the Cesium plugin to locate the building in Google 3D Maps Tiles for context. A week’s work in a matter of a day.
Stats
- 1.2 GB BIM model (19 embedded working files)
- 700k objects condenced down into 75 meshes with material data
- 32 million polys down to 4 million (unfortunately the fire service piping didn’t make the import due to too much detail)
- All processed on a laptop with 32GB of RAM (unheard of 5 years ago)
- Ceveat: Mesh only data, I’d need to impliment a Rhino/Grasshopper workflow for dealing with solids/surfaces


Unreal Plane Sim
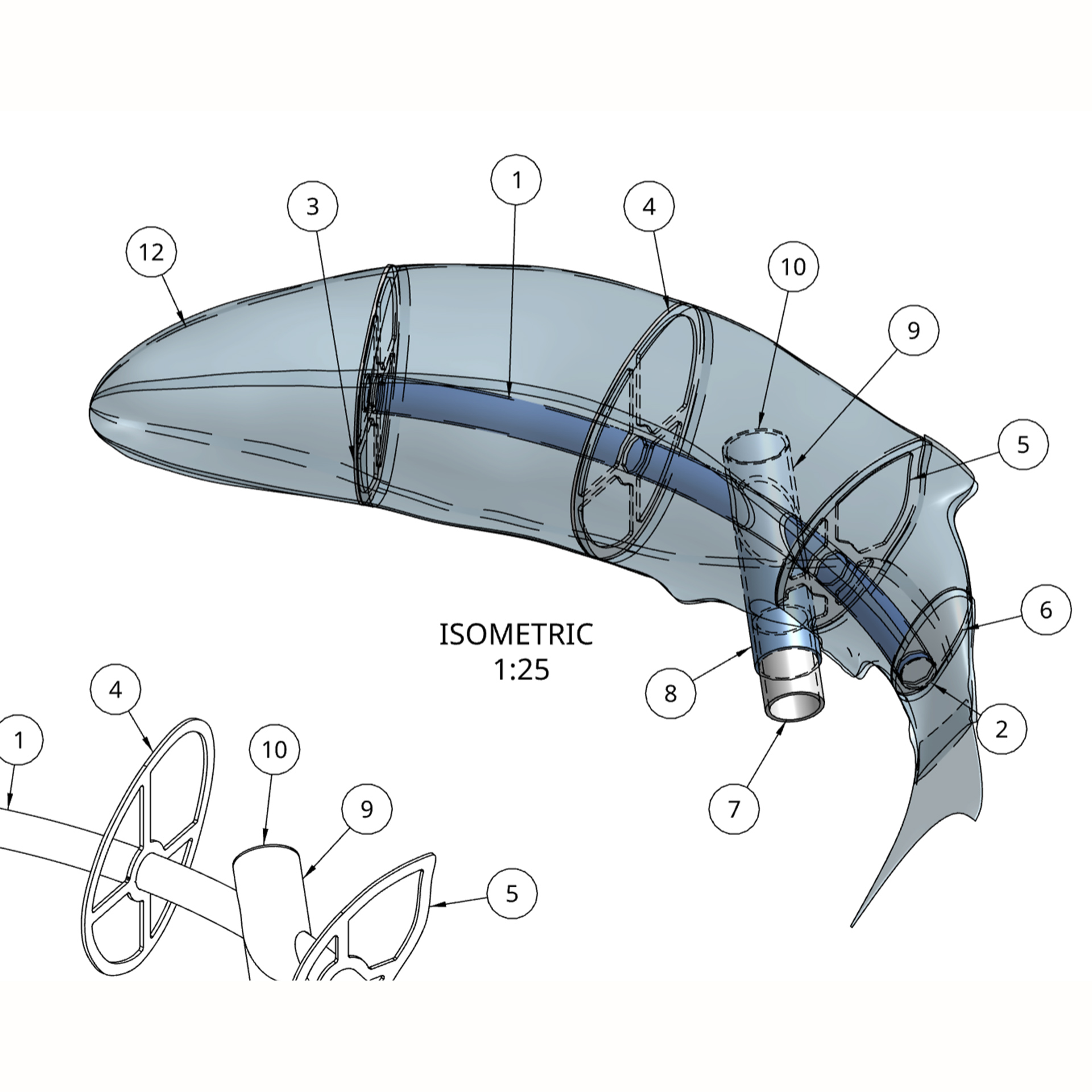
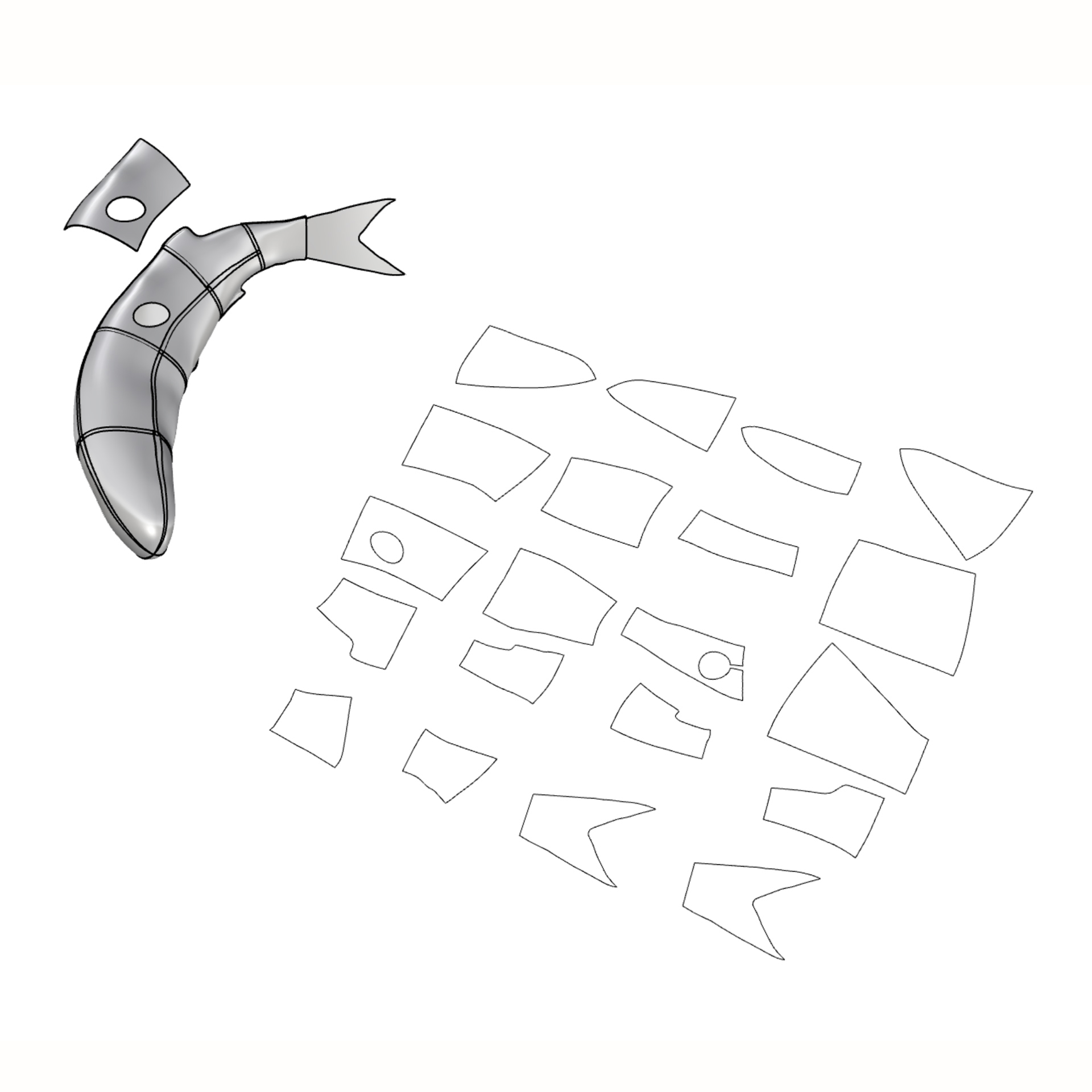
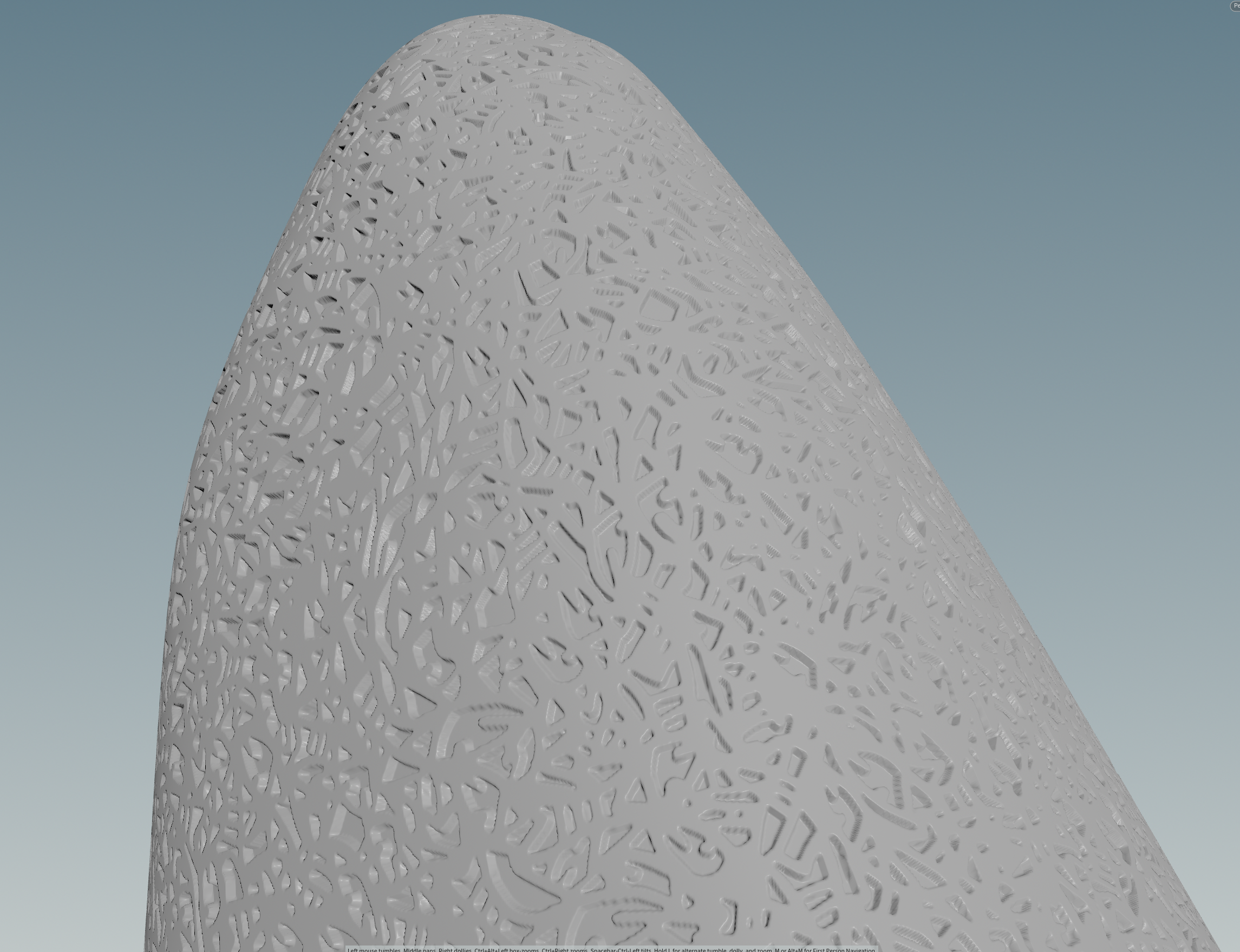
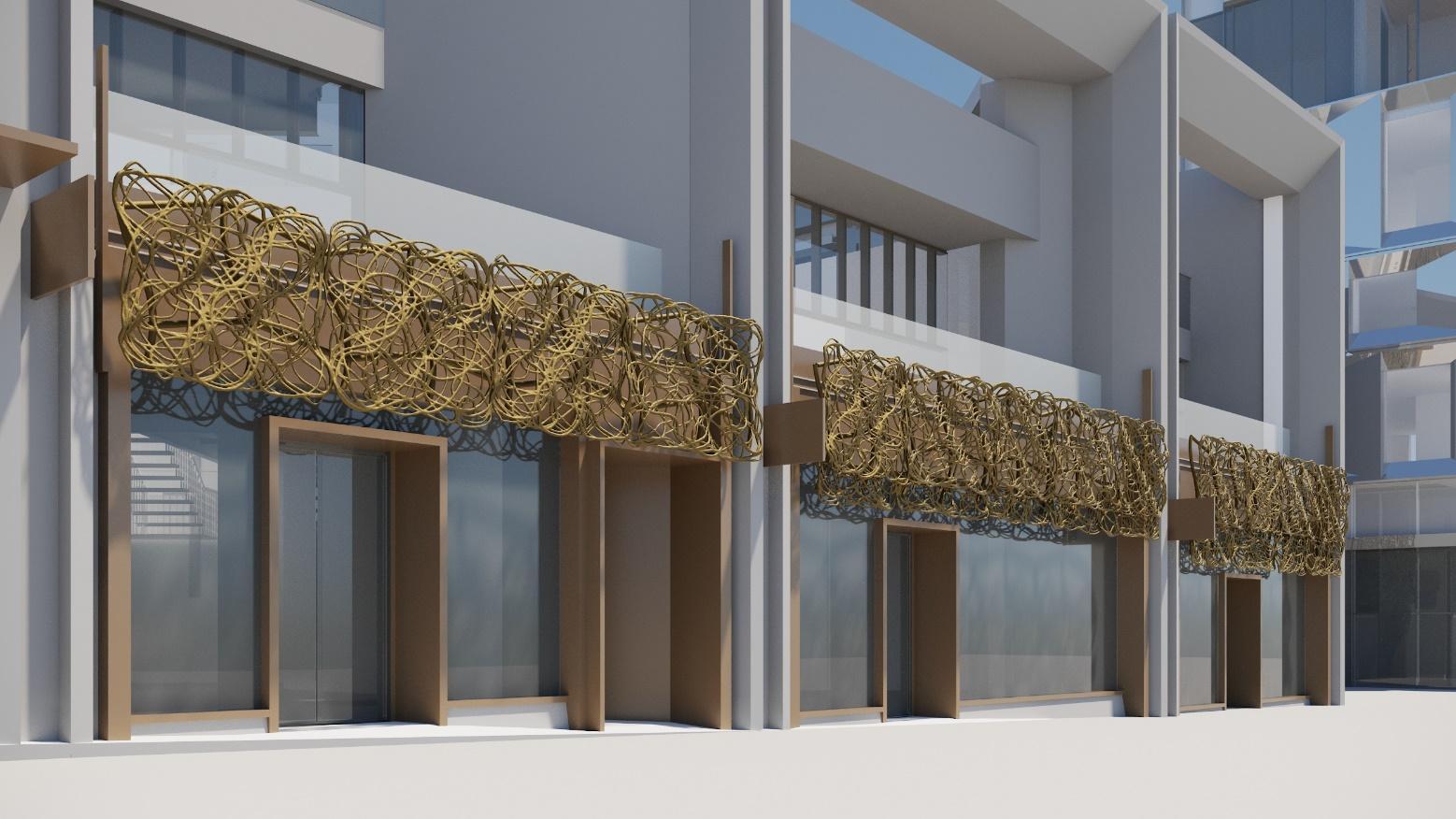
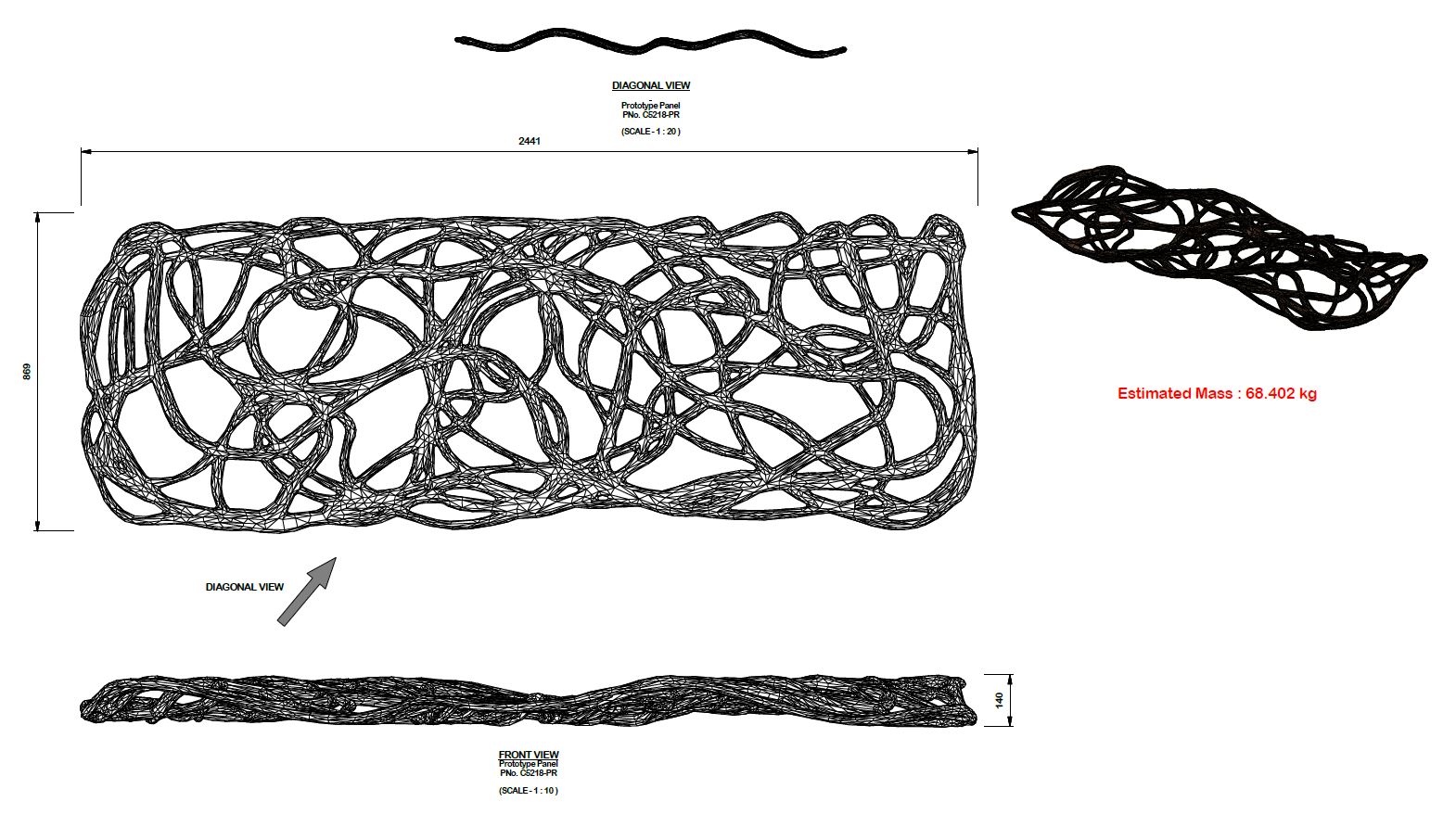
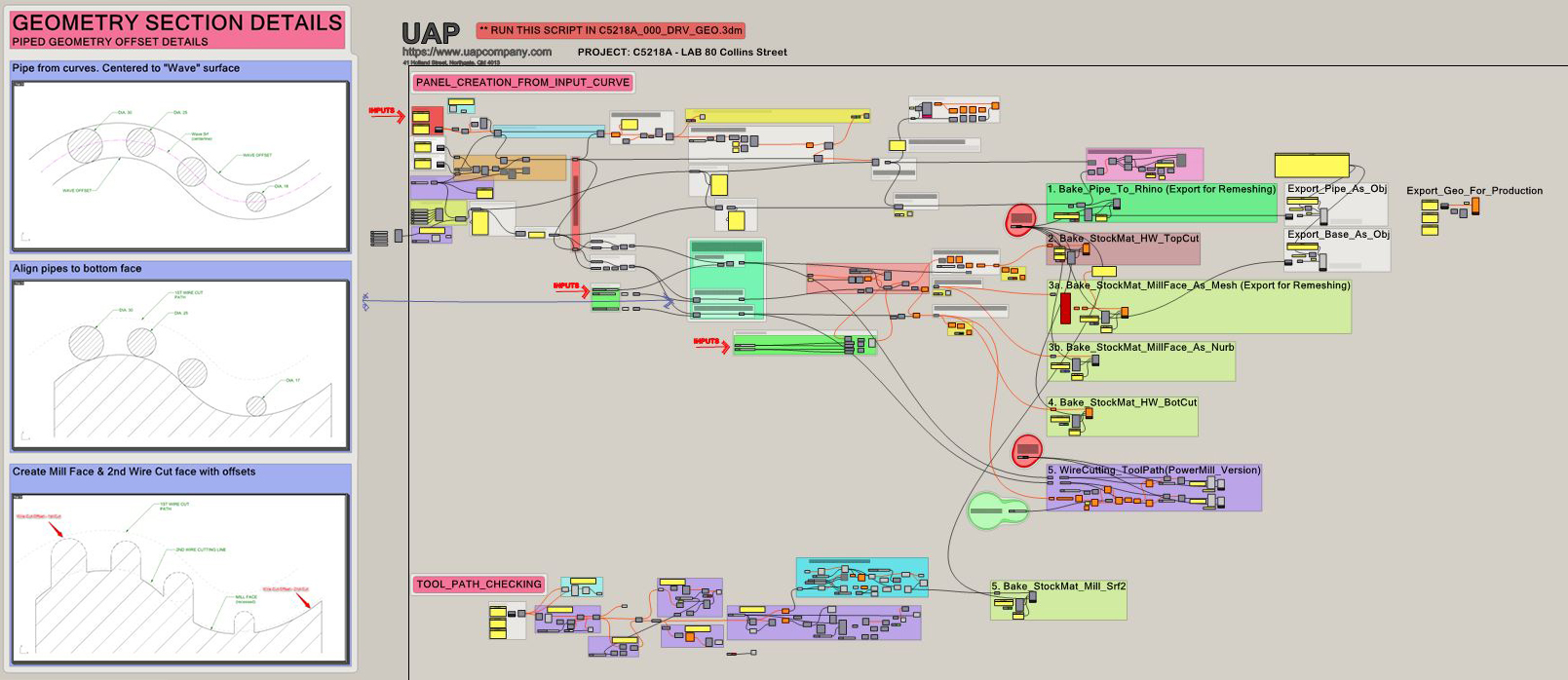
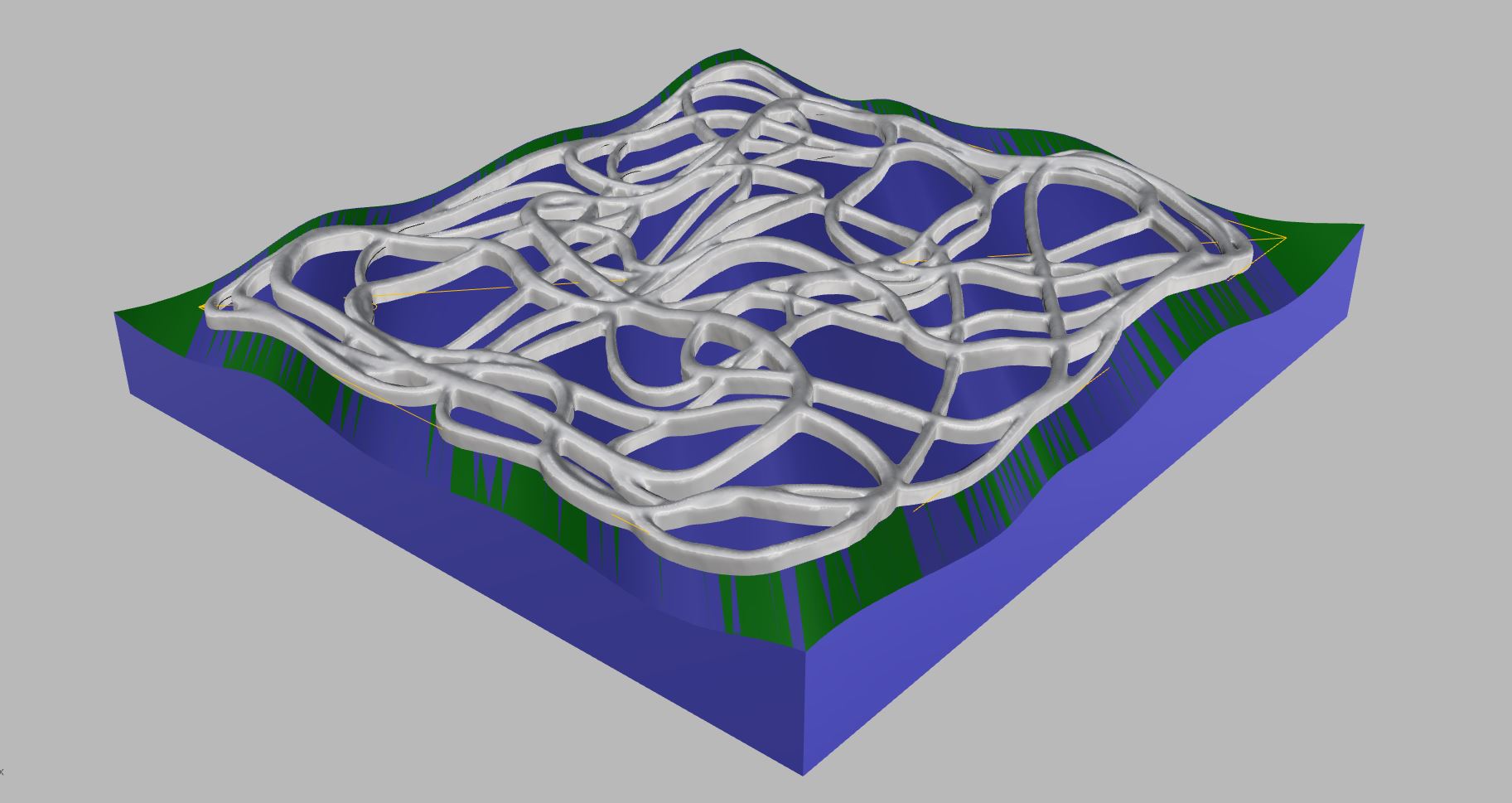
Digital Panalization
Project: 'Destiny' by Mr Wanambi (1962-2022) - Large-scale perforated fish sculpture.
Technical Challenge:
Bridging First Nations artist's 2D patterning with 3D scanned form through:
- Complex surface panelization
- Vector texture mapping onto organic geometry
- Realtime hole locating system
I worked with Andrew Dane to develop:
- Hybrid fabrication workflow merging digital and traditional techniques
- On-the-fly problem solving for physical/digital translation
- Precision alignment systems for cultural artwork integrity
-
Seamless integration of artistic vision and technical execution
Fabricated by Perides Art Projects.
We proved how advanced technical design can serve cultural preservation - transforming 2D patterns into 3D form without compromising artistic intent.


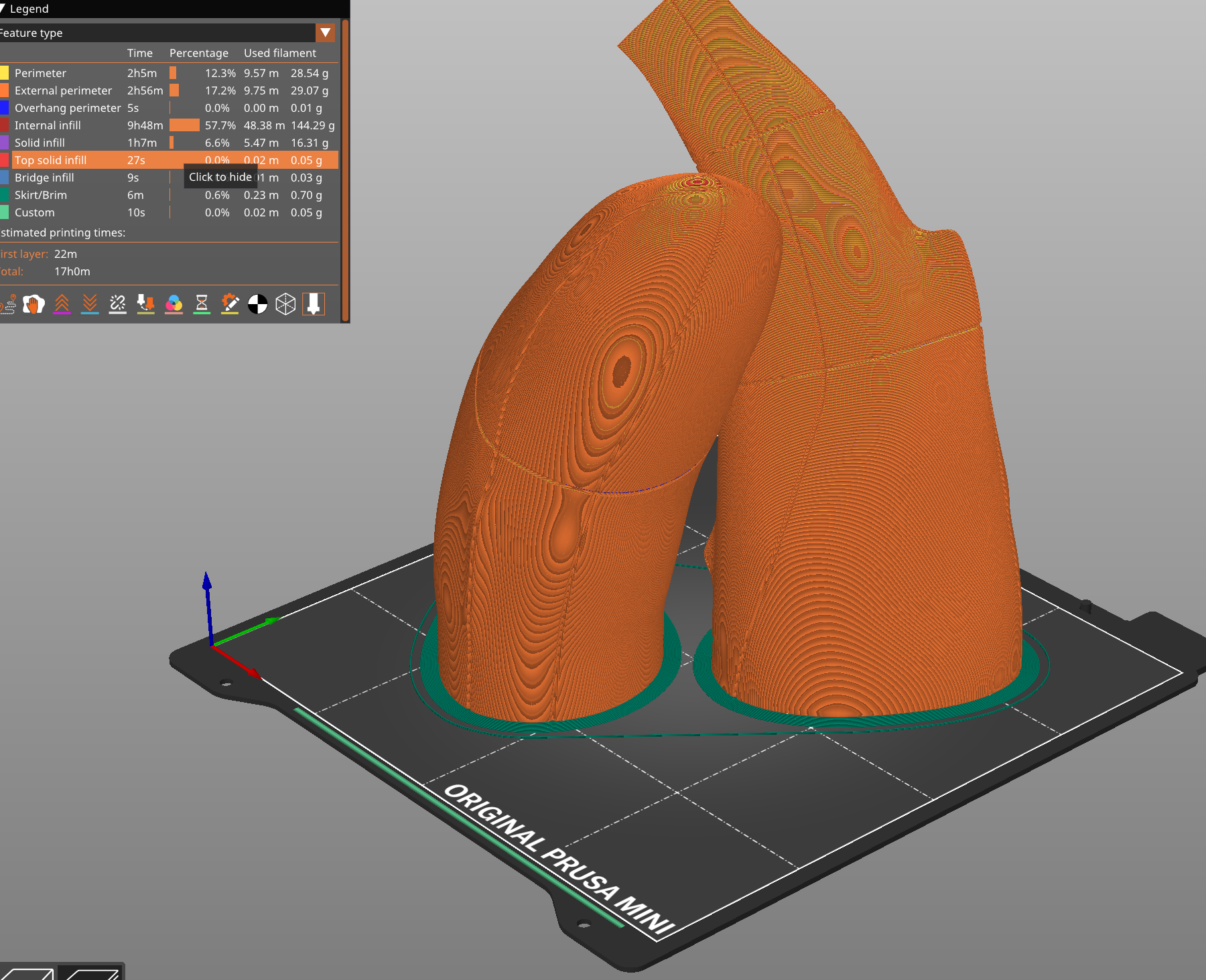

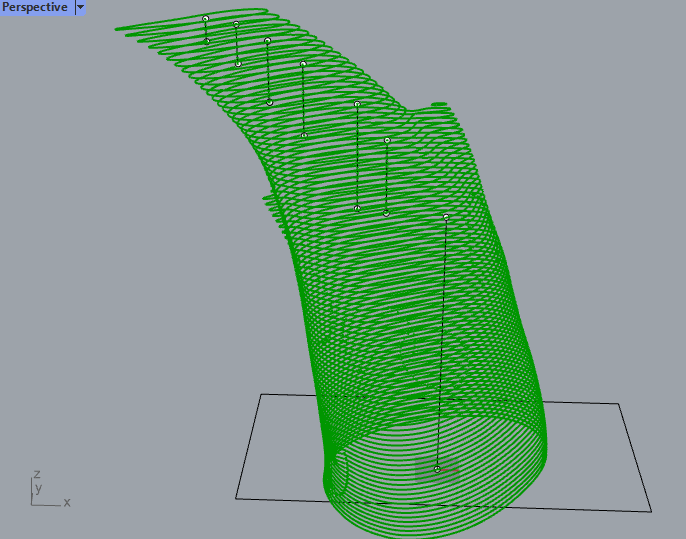



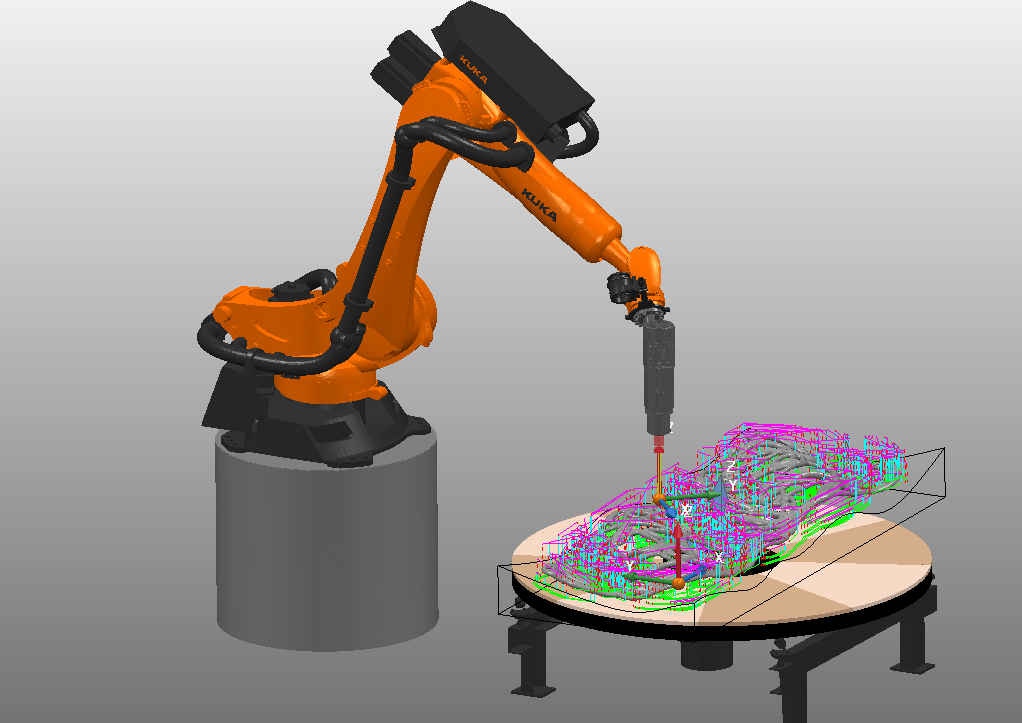
Procedural Design for Robots
Beyond design, I operated as a one-person technical team: developing the virtual production pipeline, programming the robot (learned in just one month), and managing milling operations. The result? A proof of concept demonstrating how parametric design and integrated workflows can deliver complex projects with unmatched efficiency—blending computational precision with hands-on fabrication expertise.




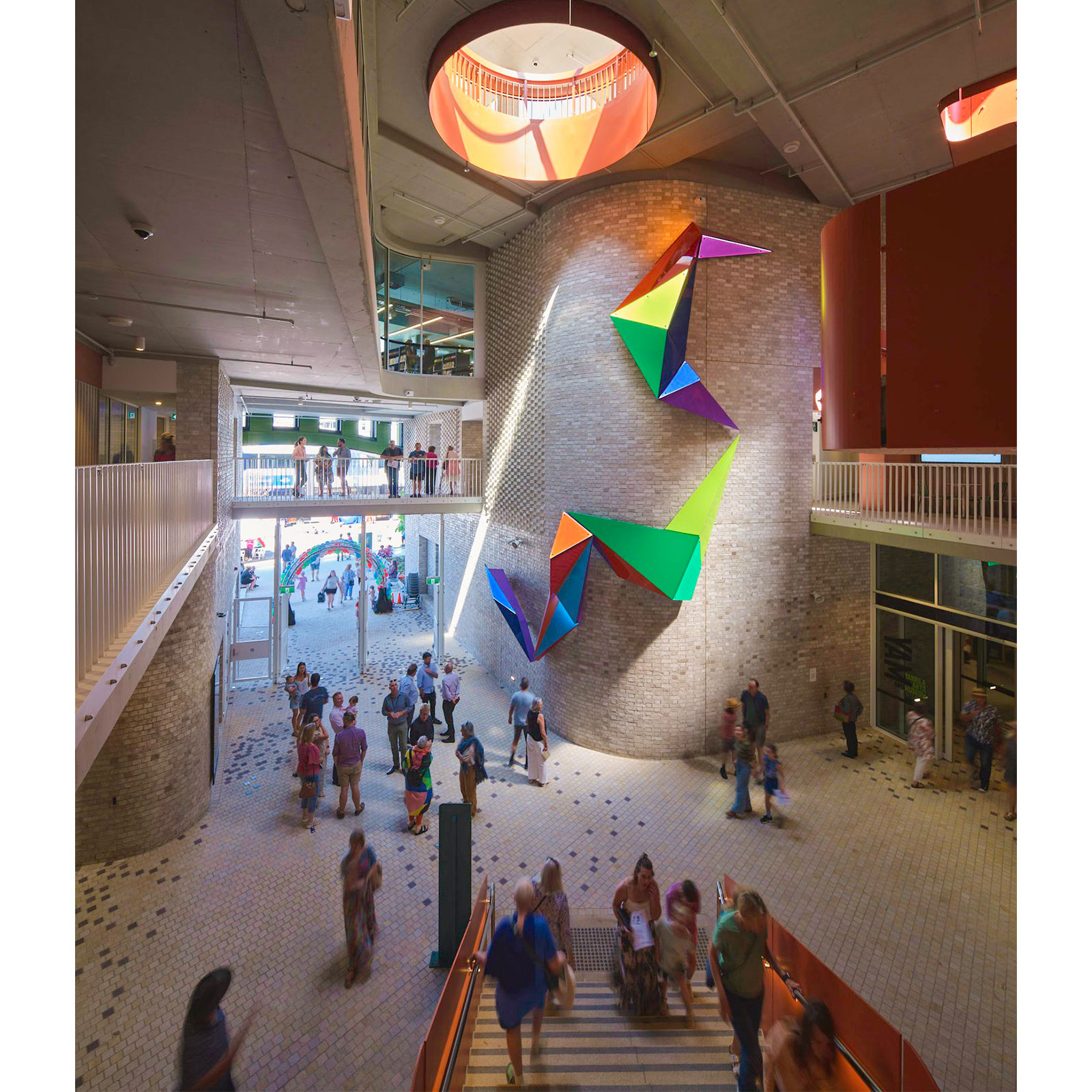
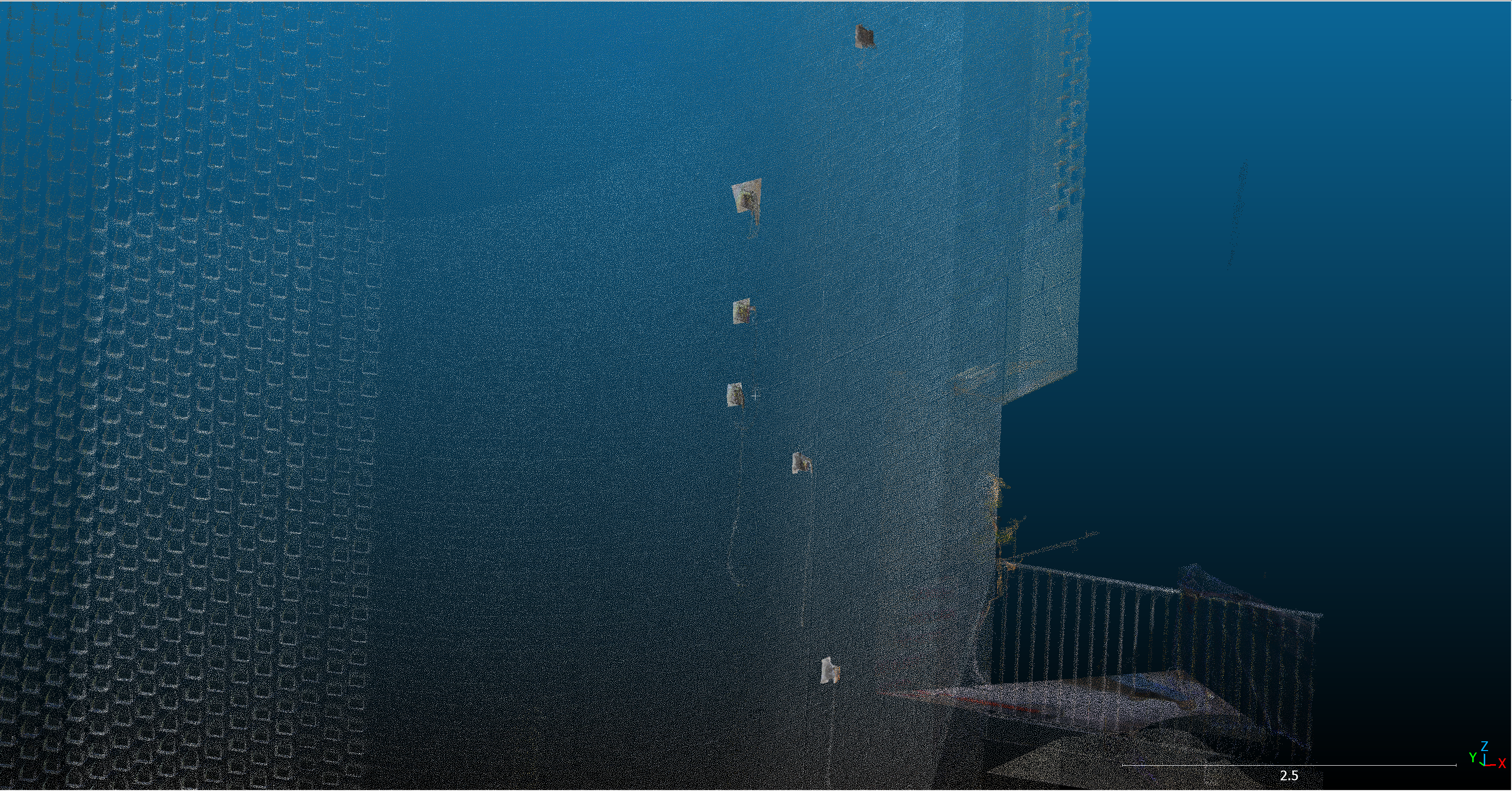
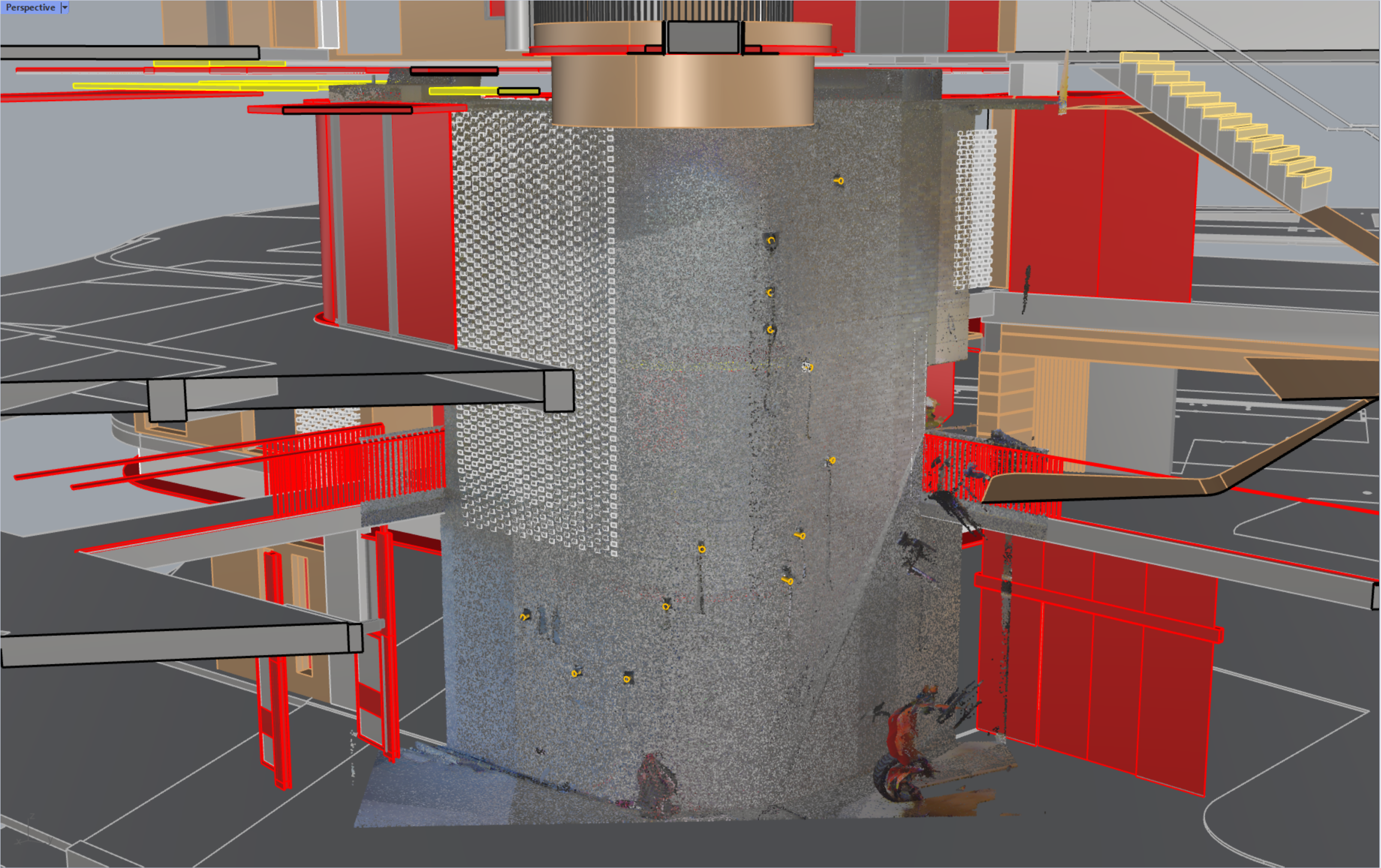
Digital Twin Aided Design
Project: Rationalized Emma Coulter's 12m artwork "Let Them Feel The Light" for curved wall mounting (in collaboration with Andrew Dane ).
Details:
- Combined 3D laser scans with CAD data to create a millimeter-accurate digital twin
- Developed an adaptive mounting system accommodating real-world construction variances
- Enabled simple installation despite complex curvature
Impact:
Proved digital twins' untapped potential for:
- Seamless art-architecture integration
- Tolerance management in imperfect builds/installations
- Pre-fabrication verification
Key Insight: "The best technical solutions disappear, leaving only the art visible."
(With thanks to Stainless Aethetics for exceptional fabrication.)